Lecture 4. Model-Free Prediction
이 포스팅은 David Silver의 RL 강좌를 기반으로 작성되었습니다.
Introduction
지난 강의에서,
- Planning by DP
- MDP를 아는 상황을 가정함
- 즉, environment를 대변하는 model이 있음을 가정
- model은 $\mathcal{P}$ (transition prob.)를 알기 때문에 next state와 reward의 정보를 제공
이번 강의에서,
- Model-free Prediction을 공부
- 즉, unknown MDP의 상황에서 value fn.을 구하는 방법
- offline method: 하나의 episode가 완전히 terminate 되었을 때 업데이트하는 방식,
Monte-Carlo - online method: 하나의 episode 내의 step마다 업데이트하는 방식,
Temporal-Difference
다음 강의에서,
- Model-free control을 공부
- 즉, value fn. 예측을 기반으로 최적의 value fn.을 구하는 방법
Monte-Carlo Learning (Offline Method)
[ Monte-Carlo Reinforcement Learning ]
- MC는 episode의 경험으로부터 직접 파악함
- MDP의 transition과 reward를 몰라도 적용 가능
- environment 전부를 아는 것이 아니라, 일부 state와 action을 샘플링하여 정보를 얻는 것
- Ex. 원의 넓이를 구하는 방법이 무지하게 복잡하다고 했을 때, 원에 해당하는 공간에 무수히 많은 점을 찍어 원의 넓이를 추정하는 것 → 점을 찍는 경험(experience)을 통해 원의 넓이(value)를 구함
- 하나의 완전한 episode로부터 학습
- offline 방식이라고 부름
- no bootstrapping
- $\text{value} = \text{mean return}$ 이라는 가장 단순한 아이디어를 적용
- 하나의 episode가 완전히 종료되어야 하기 때문에 terminate state가 반드시 정의되어야 함
[ Monte-Carlo Policy Evaluation ]
목표: policy $\pi$ 가 주어졌을 때, 여러 episode로부터 $v_\pi$ 를 학습하는 것
- 기존의 value fn.: 현재 state로부터 return에 대한 기댓값 ($\because$ 모든 전이 확률과 reward를 알고 있음)
- MC의 value fn.: 샘플링된 경험들 중 return에 대한 평균값
- Monte-Carlo policy evaluation은 기댓값 대신에, 경험적으로 episode들을 탐색 후 얻는 reward들의 평균값을 의미
first-visit MC vs. every-visit MC
state $s$ 를 평가하기 위해 특정 state $s$를 방문한 순서에 따라 reward의 평균을 다르게 구함
기본적으로, 아래의 알고리즘을 따름
- when visit $s$,
- increment counter: $N(s) \gets N(s)+1 $
- increment total return: $S(s) \gets S(s)+G_t $
- value is estimated by mean return $V(s) = S(s) / N(s) $
- by law of large numbers(큰 수의 법칙), $V(s) \to v_\pi(s)$ as $ N(s) \to \infty $
1
2
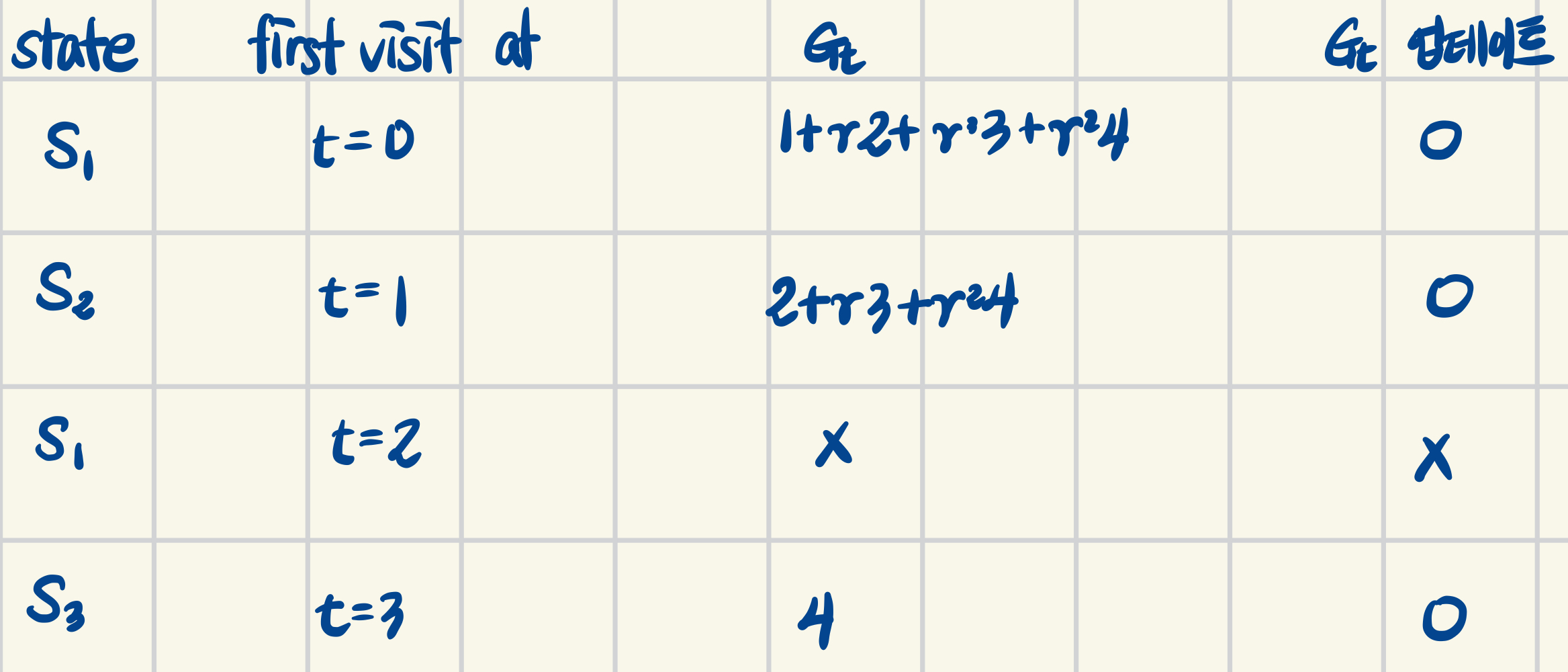
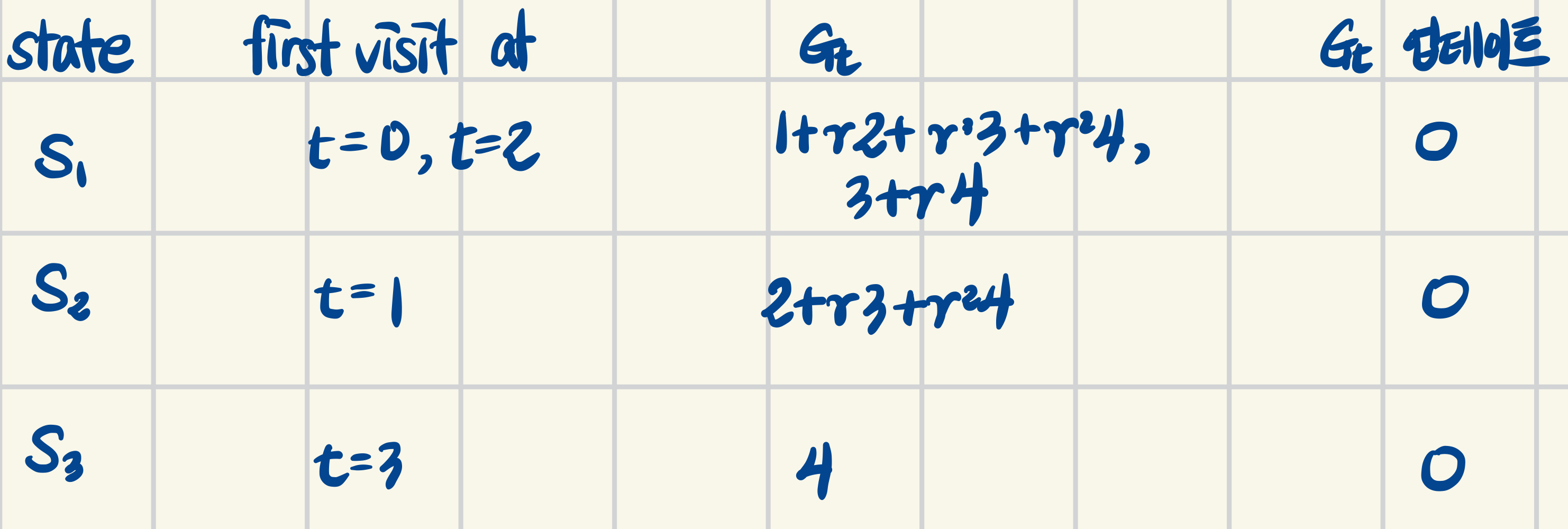
episode: S1 → S2 → S1 → S3 → terminal
rewards: 1 → 2 → 3 → 4 → 0
[ First-Visit Monte-Carlo Policy Evaluation ]
- 각 episode 내에서 어떤 상태 $s$ 가 처음 등장했을 때만 이후의 return을 계산해서 해당 state의 value fn.을 업데이트
[ Every-Visit Monte-Carlo Policy Evaluation ]
- 각 episode 내에서 어떤 상태 $s$ 가 등장할 때마다 이후의 return을 계산해서 해당 state의 value fn.을 업데이트
Incremental Monte-Carlo
모든 episode들이 끝난 뒤에 sum을 평균내지 않고, episode가 끝날 때마다 online방식처럼 update 할 수 있음
[ Incremental Monte-Carlo Updates ]
Incremental Mean (산술 평균)
LaTeX이 귀찮아 손필기로 대체...
- Incremental Mean에 의해 모든 episode들을 수집한 뒤에 업데이트하지 않고, 하나의 episode가 종료되었을 때 업데이트 할 수 있음
- 각 state $S_t$ 의 return이 $G_t$ 일 때
- $N(S_t) \gets N(S_t)+1$
- $V(S_t) \gets V(S_t) + \frac{1}{N(S_t)} (G_t - V(S_t))$
- $\frac{1}{N(S_t)}$ 로 나누는 단순 평균이기 때문에 시간 정보를 반영하기 어려움 (stationary에 적합)
- 시간에 따라 변하는 환경(non-stationary)에 경우, 과거의 정보를 점점 잊는 것이 중요함
- running mean을 적용
- $V(S_t) \gets V(S_t) + \alpha (G_t - V(S_t))$
- $\alpha$ 는 learning rate로써, 1보다 작을 경우 시간에 따라 서서히 과거 정보를 잊게 하는 역할
| environment | $\alpha$ | 의미 |
|---|---|---|
| stationary | $\frac{1}{N(S_t)}$ | 모든 episode에 대해 동일한 가중치로 평균 |
| non-stationary | 고정된 작은 상수 (e.g. 0.1) | 최근 episode의 중요도를 더 높임(과거 서서히 잊기) |
Temporal-Difference Learning (Online Method)
- episode의 경험으로부터 직접 학습
- MC와 같이 model-free 방식
- episode가 종료되지 않아도 즉, 불완전한 episode로부터 학습이 가능
- bootstrap: episode가 끝날 때까지 기다리지 않고, 다른 estimated value를 활용해서 현재 state를 eval
- 즉, guess로부터 guess를 업데이트
[ Monte-Carlo & Temporal-Difference ]
- 잠깐 MC recap
- MC가 offline method인 이유: $G_t$ 는 최종 return이기 때문에 현재 state로부터 terminal state까지의 값을 모두 알아야 함
- 반면에 Temporal-Difference learning에서는… (TD(0) 기준으로)
- episode가 종료될 때까지 기다리는 게 아니라, 현재 state에서 다음 state의 결과만 확인한 뒤 업데이트를 수행
- $G_t$ 대신에 Bellman Expected Equation을 사용
- $R_{t+1} + \gamma V(S_{t+1})$: TD target
- $\delta_t = R_{t+1}+\gamma V(S_{t+1}) - V(S_t)$: TD error
[ MC vs. TD: Driving Home Example ]
| State | Elapsed Time (minutes) | Predicted Time to Go | Predicted Total Time |
|---|---|---|---|
| leaving office | 0 | 30 | 30 |
| reach car, raining | 5 | 35 | 40 |
| exit highway | 20 | 15 | 35 |
| behind truck | 30 | 10 | 40 |
| home street | 43 | 0 | 43 |
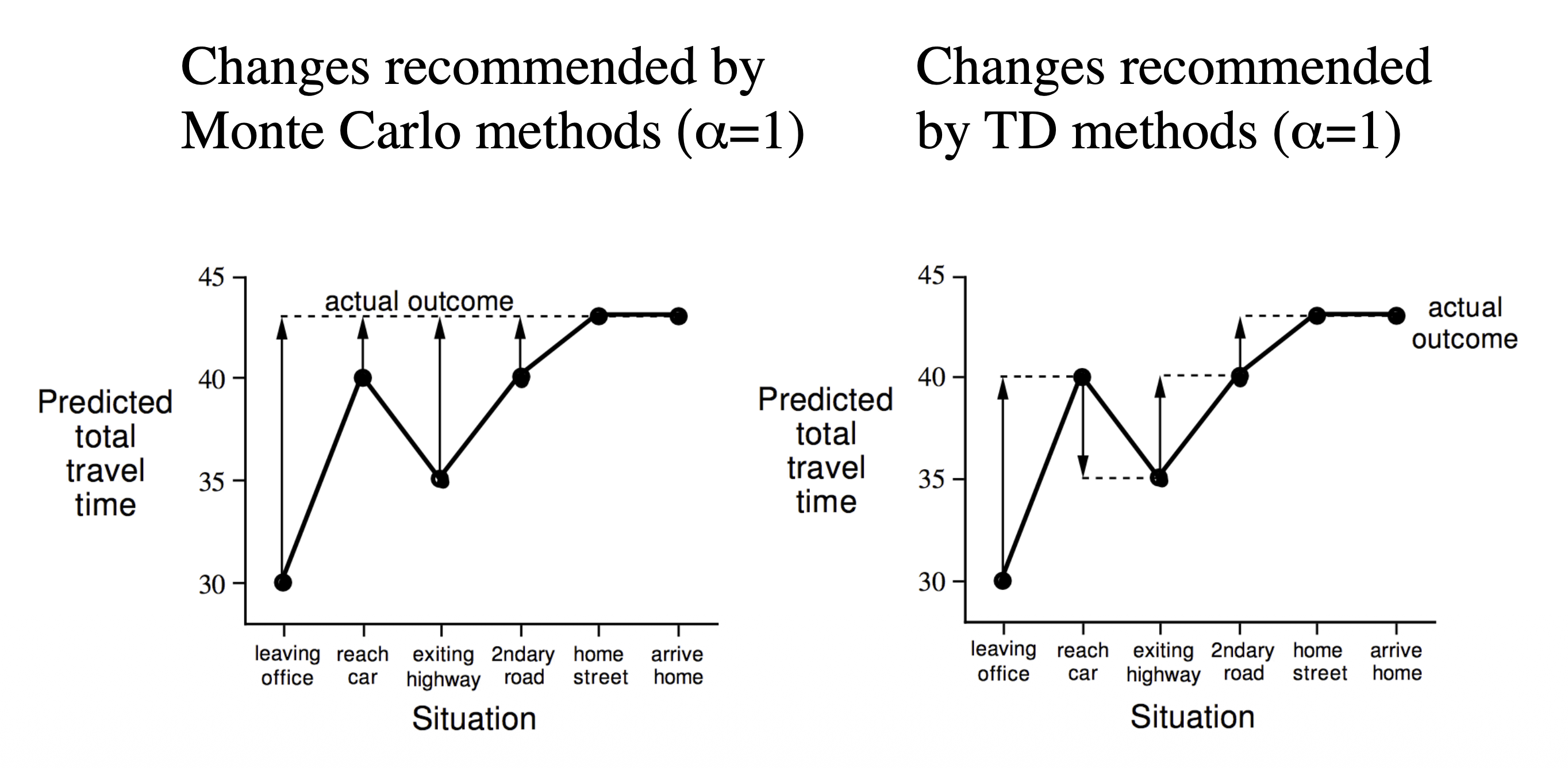
- 왼쪽: Monte-Carlo
- 하나의 episode가 종료되었을 때, 각 state를 최종값으로 업데이트
- episode가 종료되었을 때가 되어서야 비로소 모든 state를 동시에 업데이트 할 수 있음 (state별 업데이트가 느림)
- 오른쪽: Temporal-Difference
- 현재 state에서 다음 state의 Predicted Total Time을 보고, 해당 값으로 업데이트
- 오직 다음 step만 확인하고 현재 state를 업데이트 할 수 있음 (state별 업데이트가 빠름)
- 다음 state에서의 예측값으로 업데이트 하기 때문에 expectation으로부터 expectation을 업데이트 (bootstrapping)
[ MC vs. TD: advantages & disadvantages ]
| TD | MC | |
|---|---|---|
| When to Update | - 한 step 이후에 value를 알 수 있음 - 불완전한 sequence 내에서도 value를 알 수 있음 - non-terminating 환경에도 적용 가능 |
- episode가 종료되고 return을 알아야 함 - 완전한 sequence 내에서만 value를 알 수 있음 - episodic 환경에서만 적용 가능 |
| Bias&Variance | low variance, some bias - 주로 MC보다 효율적임 - TD(0)는 $v_\pi(s)$ 로 수렴이 보장됨 - 초기값에 영향을 크게 받음 |
high vairance, zero bias - 항상 최적으로 수렴을 보장 - 초기값의 영향이 작음 - 단순하고 적용이 쉬움 |
| Makrov | Markov property를 탐색 ($\because$ next state를 확인해야 함) |
non-Markov에 더 적합 ($\because$ 모든 가능한 state들을 직접 탐색) |
| Bootstrapping | O | X |
| Sampling | O | O |
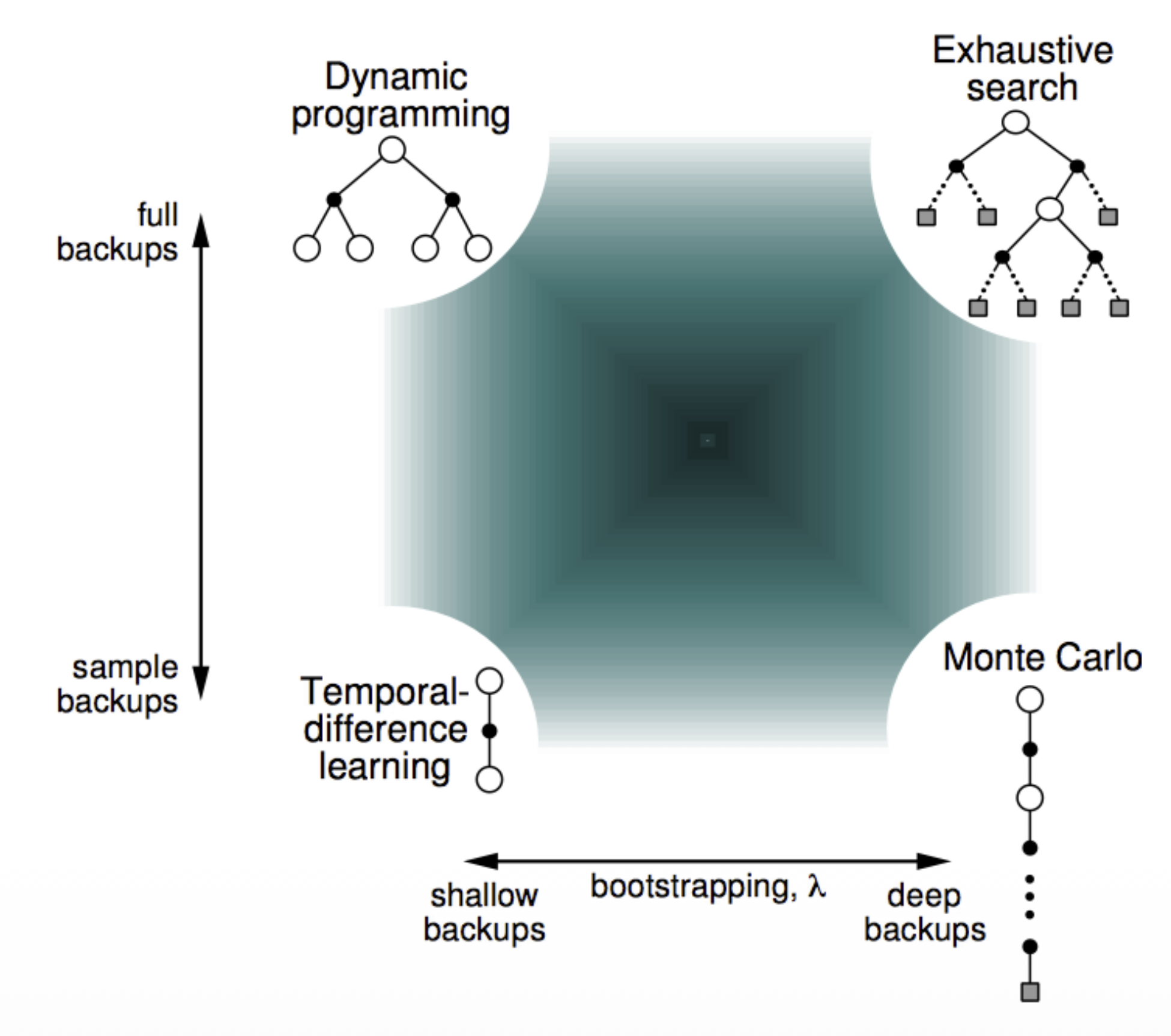
- bias: 실제 기댓값과 현재의 추정값이 다른지 (예측이 포함되었는지, 경험적인 결과인지)
- variance: 데이터 자체의 값의 변동이 큰지 (실세계의 값일 수록 noisy한 경향이 있음)
- bootstrapping: 업데이트가 예측을 동반하는지 (DP는 O)
- sampling: 모든 경우를 대표하는 기댓값을 활용하는지 (DP는 X)
Batch MC & TD
- $k$ step을 사전에 정의해두고, 해당 episode 또는 step만큼 샘플링한 뒤, MC/TD error를 계산해서 업데이트를 수행하는 방법
TD($\lambda$)
n-step TD
- 앞서 설명한 TD(0)는 one-step lookahead로, 빠르지만 bias 존재
- MC는 bias가 없지만 terminate state까지 기다려야 함
- 둘을 조합하여 n-step lookahead를 수행하는 TD를 구현한다면?
[ n-Step Return ]
- n-step return은 다음과 같음
- n=1: $G_t^{(1)} = R_{t+1} + \gamma V(S_{t+1})$
- n=2: $G_t^{(2)} = R_{t+1} + \gamma V(S_{t+2}) + \gamma^2V(S_{t+2})$
- …
- n=$\infty$ (MC): $G_t^{\infty} = R_{t+1} + \gamma V(S_{t+2}) + … + \gamma^{T-1}R_T$
- n-step return: $G_t^{(n)} = R_{t+1} + \gamma V(S_{t+2}) + … + \gamma^nV(S_{t+n})$
- n-step TD learning: $V(S_t) \gets V(S_t) + \alpha (G_t^{(n)} - V(S_t))$
[ Averaging n-Step Returns ]
- n-step return에 대해서 step이 달라질 때마다 정보량이 다름
- $\lambda$-return: 모든 n-step들의 return인 $G_t^{(n)}$ 을 결합
- $1-\lambda$: normalizing factor로, 가중치항만 볼 때 총합이 1이 되도록 보정하는 역할
- $\lambda$: weight decay parameter로, n-step에 따라 그 영향력을 조정
Forward-View TD($\lambda$)
\[V(S_t) \gets V(S_t) + \alpha (G_t^\lambda - V(S_t))\]- 현재 state $S_t$ 에서 다음 state, 또 그 다음 state를 순차적으로 살펴보는 방식 → MC처럼 완전한 episode일 때 적용 가능
- 1-step부터 terminate state까지 누적해야 하기 때문에 이론적으로만 가능함
Backward-View TD($lambda$)
- backward-view TD는 forward-view TD와 동치이지만, 실현 가능한 방법
- online으로, 매 step마다, 불완전한 episode에 적용 가능한 방법
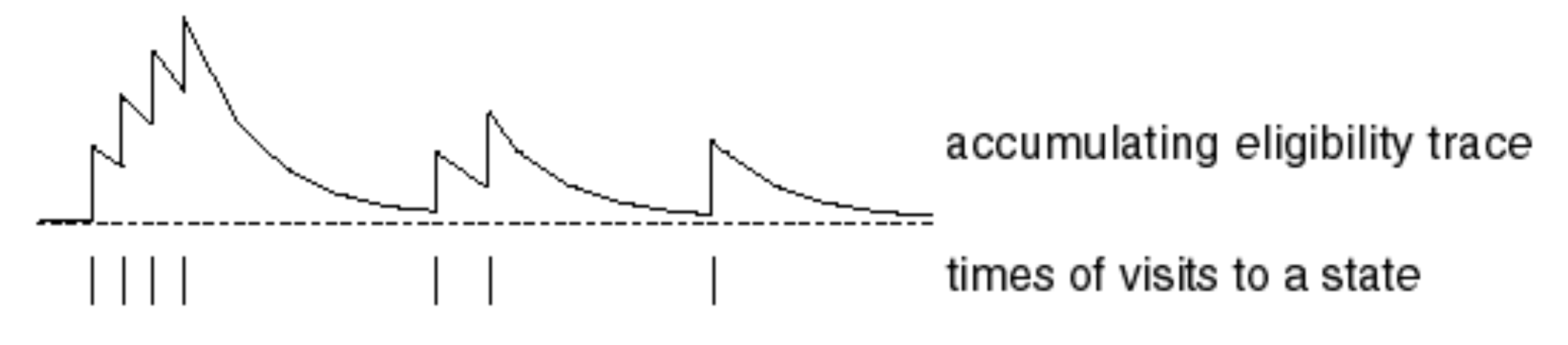
[ Eligibility Traces ]
frequency heuristic과 recency heauristic을 결합하여 방문한 state의 상태를 기록하는 방법
-
frequency heuristic자주 방문한 state의 중요도를 높임 -
recency heuristic최근에 방문한 state의 중요도를 높임
- $\gamma \lambda$: timestep이 멀어질 수록 영향력이 감소 (recency hearistic)
- $\gamma$: discount factor, 미래 보상의 중요도는 감소되어야 함 (TD error를 구할 때도 사용됨)
- discount factor를 과거의 Eligibility Trace에 곱하는 이유
- 현재 timestep에서 특정 state의 eligibility trace 값이 바뀌면, 해당 값을 과거 timestep의 해당 state에 반영해야 함
- 이때, 현재 timestep에서 멀수록 그 영향력을 작게 전달해야 함
- discount factor를 과거의 Eligibility Trace에 곱하는 이유
- $\lambda$: weight decay parameter, 시간이 지나면 과거의 정보는 점점 희미해져야 함
- $\gamma$: discount factor, 미래 보상의 중요도는 감소되어야 함 (TD error를 구할 때도 사용됨)
- $1(S_t=s)$: timestep $t$ 에 방문한 state가 현재 state $s$ 와 동일하면 +1 (frequency hearistic)
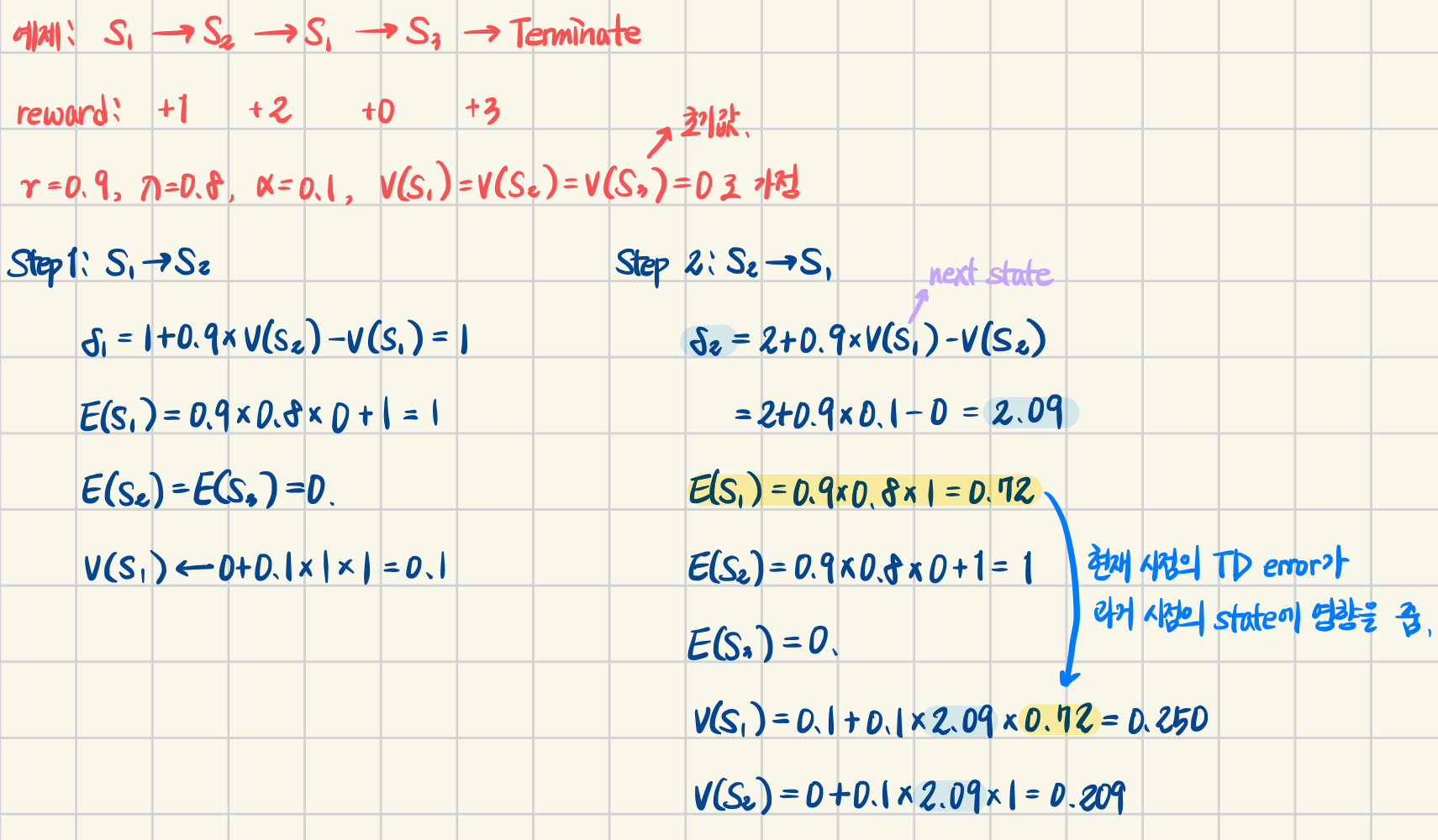
[ Backward-View TD($\lambda$) ]
\[\delta_t = R_{t+1} + \gamma V(S_{t+1}) - V(S_t) \\ V(S) \gets V(s) + \alpha \delta_t E_t(s)\]- 앞서 정의한 eligibility traces($E_t(s)$)를 TD($\lambda$)에 반영
- 현재 timestep $t$ 에서 발생한 TD error($\delta_t$)가 eligiblity traces로 인해 과거 발생한 value fn.에도 영향을 줌 (아래 예제로 확인)
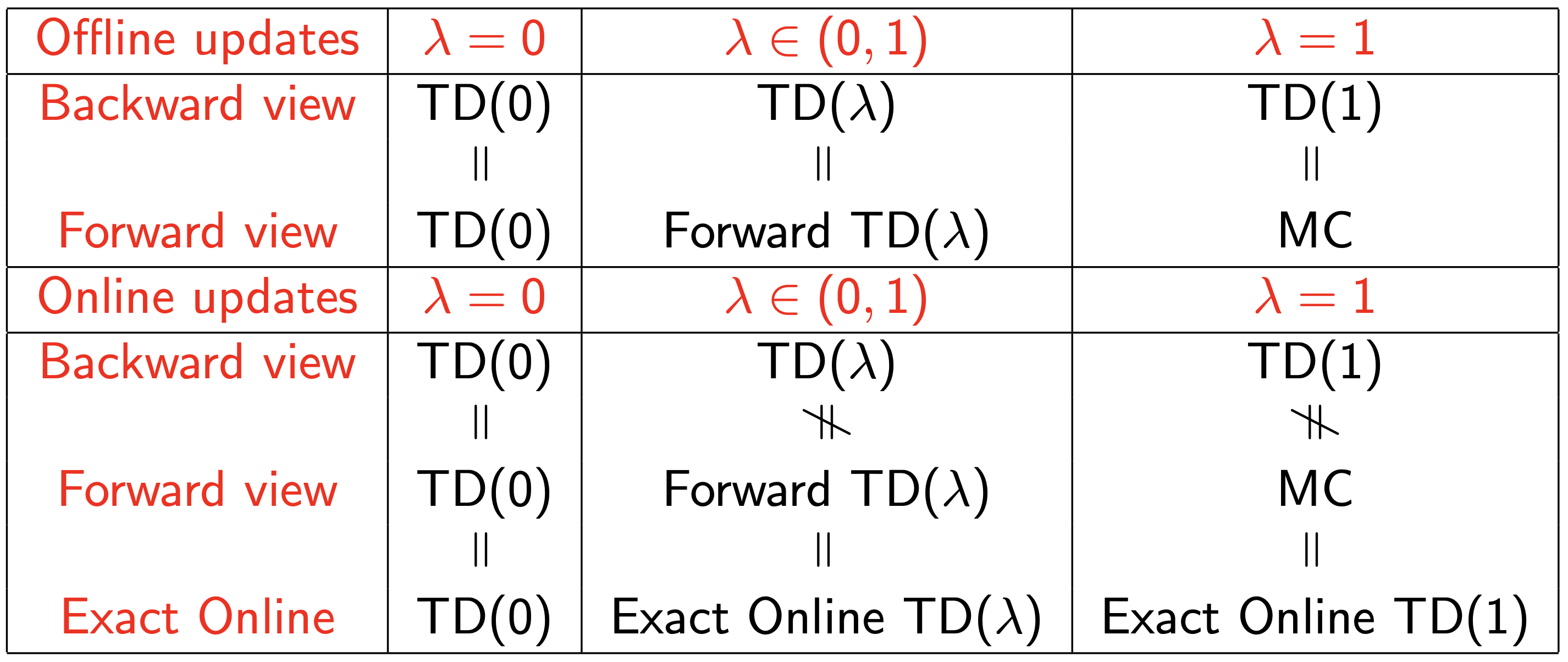
Forward and Backward Equivalence
(교안에는 근사를 통해 증명하는 과정이 있지만, 강의에서도 스킵했으니 나도 패스…0_<)
Offline updates…
- episode 내에 업데이트를 누적해둠
- episode가 종료되었을 때 배치로 업데이트
Online updates…
- TD($\lambda$)는 각 episode 내의 매 step마다 업데이트
- forward & backward-view TD($\lambda$)는 살짝 다를 수 있음
- eligibility trace를 활용한 정확한 online TD($\lambda$)는 완벽하게 동치
[ Summary of Forward and Backward TD($\lambda$) ]