Lecture 2. Markov Decision Process
이 포스팅은 David Silver의 RL 강좌를 기반으로 작성되었습니다.
Markov Processes
Introduction
- Markov decision processes는 강화학습에서 environment를 묘사 (where the environment is fully observable)
- 거의 모든 RL 문제들을 MDP로 표현 가능
- optimal control은 continuous MDP로 해결
- partially observable problem도 MDP로 변환해서 해결 가능
- bandit(action → get feedback)은 state가 하나인 MDP
Markov Property
"The future is independent of the past given the present"
- state는 history로부터 모든 관련 있는 정보를 포함 → state를 알면, history를 전혀 몰라도 됨
- The state is sufficient statistic of the future
[ State Transition Matrix ]
\[\mathcal{P}_{SS'} = \mathbb{P}[S_{t+1}=s'|S_t=s]\]- $s$: Markov state
- $s’$: 전이 결과 state
- $\mathcal{P}$: state 전이 확률
- 전이 행렬 $\mathcal{P}$ 는 state $s$ 로부터 전이 결과 state $s’$ 으로의 전이 확률을 표현하며, 각 행의 총합은 1
Markov Chains
[ Markov Process ]
이 자체로 강화학습을 수행하는 것이 아니라, 어떤 state가 Markov Property를 만족하는 프로세스에 대한 정의
Markov Process (or Markov Chain) 튜플 $<\mathcal{S}, \mathcal{P}>$ 에 대하여
- $\mathcal{S}$: state들의 유한 집합
- $\mathcal{P}$: state 전이 확률 행렬
(+ sample: 특정 state에서 terminate/goal state까지의 sequence)
Markov Reward Processes
MP에서 value(가치)를 추가한 프로세스
Markov Process (or Markov Chain) 튜플 $<\mathcal{S}, \mathcal{P}, \mathcal{R}, \gamma>$ 에 대하여
- $\mathcal{S}$: state들의 유한 집합
- $\mathcal{P}$: state 전이 확률 행렬
- $\mathcal{R}$: reward 함수
- $\gamma$: discount factor (시간적 요소를 반영), $\gamma \in [0, 1]$
Return
time-step $t$에서 얻을 수 있는 모든 할인(by discount factor)된 reward의 총합
- $\gamma$는 미래 reward에 대한 현재의 값
- 현재 timestep에서 지연된 reward들에 대해 즉각적인 reward를 구할 수 있음
- $\gamma \to 0$: “myopic” 평가
- $\gamma \to 1$: “far-sighted” 평가
Why Discount?
- 수학적 편의성 (수렴)
- cyclic MP에서의 무한 루프 회피
- 미래에 대한 불확실성: reward를 예측하는 model이 불완전할 수 있기 때문에 timestep이 멀어질 수록 불확실성이 커짐
- reward가 금전적인 문제와 관련이 있다면, 미래보다 즉시 받을 수 있는 reward가 더 가치있음
- 동물/사람은 즉각적인 reward에 더 크게 반응 (agent를 cognitive model처럼 생각)
- 모든 sequence에 대해 종료 조건이 존재한다면 $\gamma=1$ 사용도 가능
Value Function
MRP에서 value 함수 $v(s)$ 는 state $s$ 로부터의 return에 대한 기댓값을 제공
- goal state까지만이 아니라 미래에 받을 수 있는 모든 누적 보상
- 기댓값인 이유: environment가 stochastic
- $v(s)$ 자체는 maxmize의 개념이 없고, agent의 action에 따라 $v(s)$ 를 통해 구한 reward를 최대화하는 것이 목표
Bellman Equation for MRPs
value 함수는 두 개의 요소로 분해 가능: 즉각적인 reward $R_{t+1}$, 다음 state에서 얻을 보상인 $\gamma v(S_{t+1})$
\[v(s) = \mathbb{E}[G_t | S_t=s] \\ = \mathbb{E}[R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + ... | S_t=s] \\ = \mathbb{E}[R_{t+1} + \gamma (R_{t+2} + \gamma R_{t+3} + ...) | S_t=s] \\ = \mathbb{E}[R_{t+1} + \gamma G_{t+1} | S_t=s] \\ = \mathbb{E}[R_{t+1} + \gamma v(S_{t+1}) | S_t=s] \\\]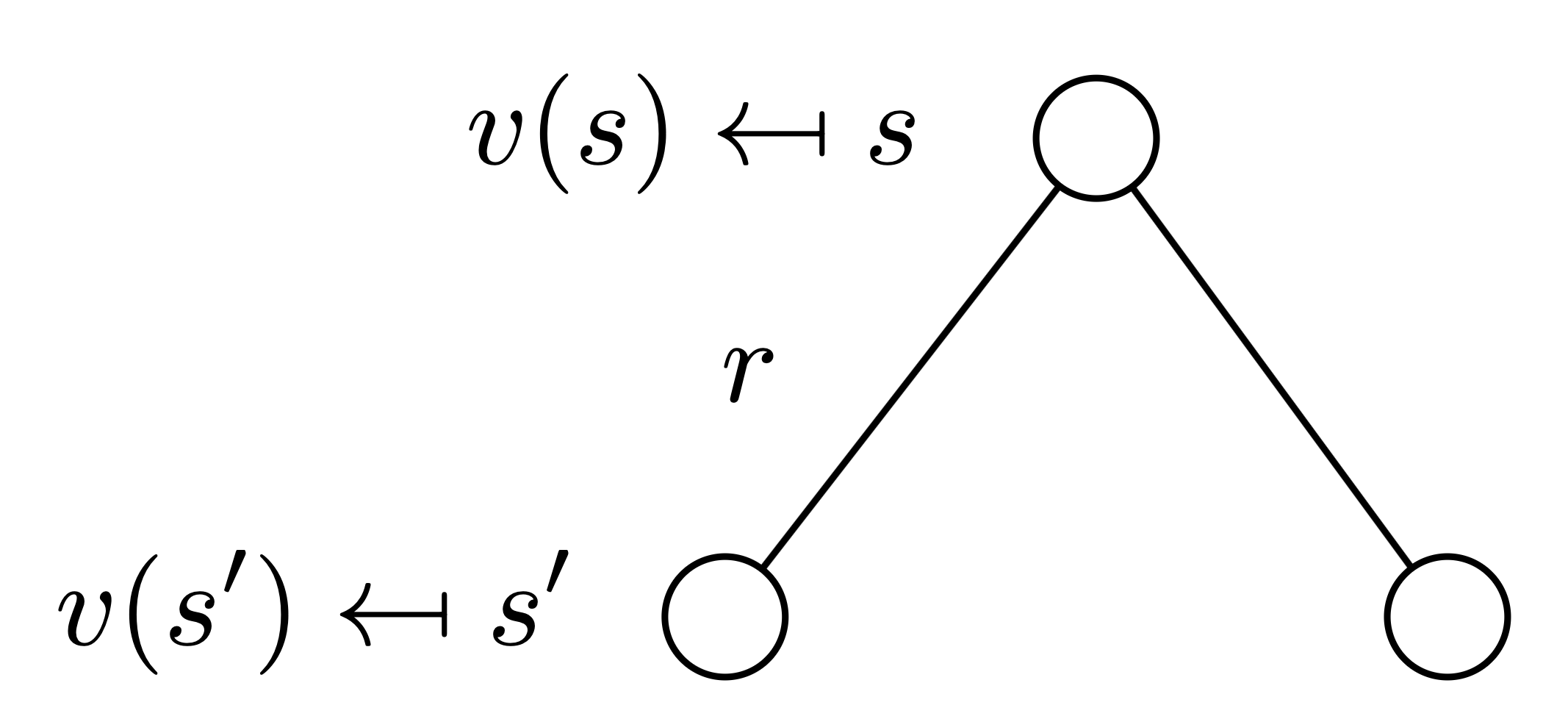
- 엣지가 한 개인 트리로 표현 가능
[ Bellman Equation in Matrix Form ]
\[v = \mathcal{R} + \gamma \mathcal{P}v\]- $v$ 는 각 요소가 state에 해당하는 열벡터
[ Solving the Bellman Equation ]
- Bellman Equation은 선형식이기 때문에 아래와 같이 해결 가능
- $n$ 개의 state들에 대한 시간 복잡도는 $O(n^3)$ → $n$ 이 너무 커지면 오래 걸릴 수 있음
- 역행렬이 존재해야 함
- 매우 큰 $n$ 에 대해서 반복적으로 접근하는 방식
- dynamic programming
- monte-carlo evaluation
- temporal-difference learning
Markov Decision Processes
MRP에서 결정의 개념을 추가한 프로세스로, 결정이 가능한 상황에서 agent가 action을 수행할 수 있음 (당연히 모든 state가 Markov)
Markov Decision Process 튜플 $<\mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma>$ 에 대하여
- $\mathcal{S}$: state들의 유한 집합
- $\mathcal{A}$: action들의 유한 집합
- $\mathcal{P}$: state 전이 확률 행렬
- $\mathcal{R}$: reward 함수
- $\gamma$: discount factor (시간적 요소를 반영), $\gamma \in [0, 1]$
Policies
state가 주어졌을 때 action에 대한 분포
- policy는 agent의 행동을 완전하게 정의
- MDP의 policy는 현재 state에 의존 (history가 아니라 $\because$ Markov)
- policy는 stationary (시간에 독립적) $\because$ Markov이기 때문에 현재 state만 확인하면 됨
$A_t~\pi (\cdot | S_t), \forall t > 0$ - 주어진 MDP $\mathcal{M} = <\mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma>$와 policy $\pi$ 에 대해서
- state들의 시퀀스 $S_1, S_2, …$ 는 Markov process $<\mathcal{S}, \mathcal{P}^\pi>$
- state와 reward들의 시퀀스 $S_1, R_2, S_2, …$ 는 Markov reward process $<\mathcal{S}, \mathcal{P}^\pi, \mathcal{R}^\pi, \gamma>$ 이며, $\mathcal{P}$ 와 $\mathcal{R}$ 은 아래를 따름
Value Function
MDP에서의 state-value function이란, state s에서 뒤따르는 policy pi에 대해 return에 대한 기댓값
MDP에서의 action-value function이란, agent가 state s에서 action a를 취했을 때, 뒤따르는 policy pi에 대해 return에 대한 기댓값
Bellman Expectation Equation
- 즉시 받을 수 있는 reward와 다음 state에서의 reward의 합으로 표현 가능
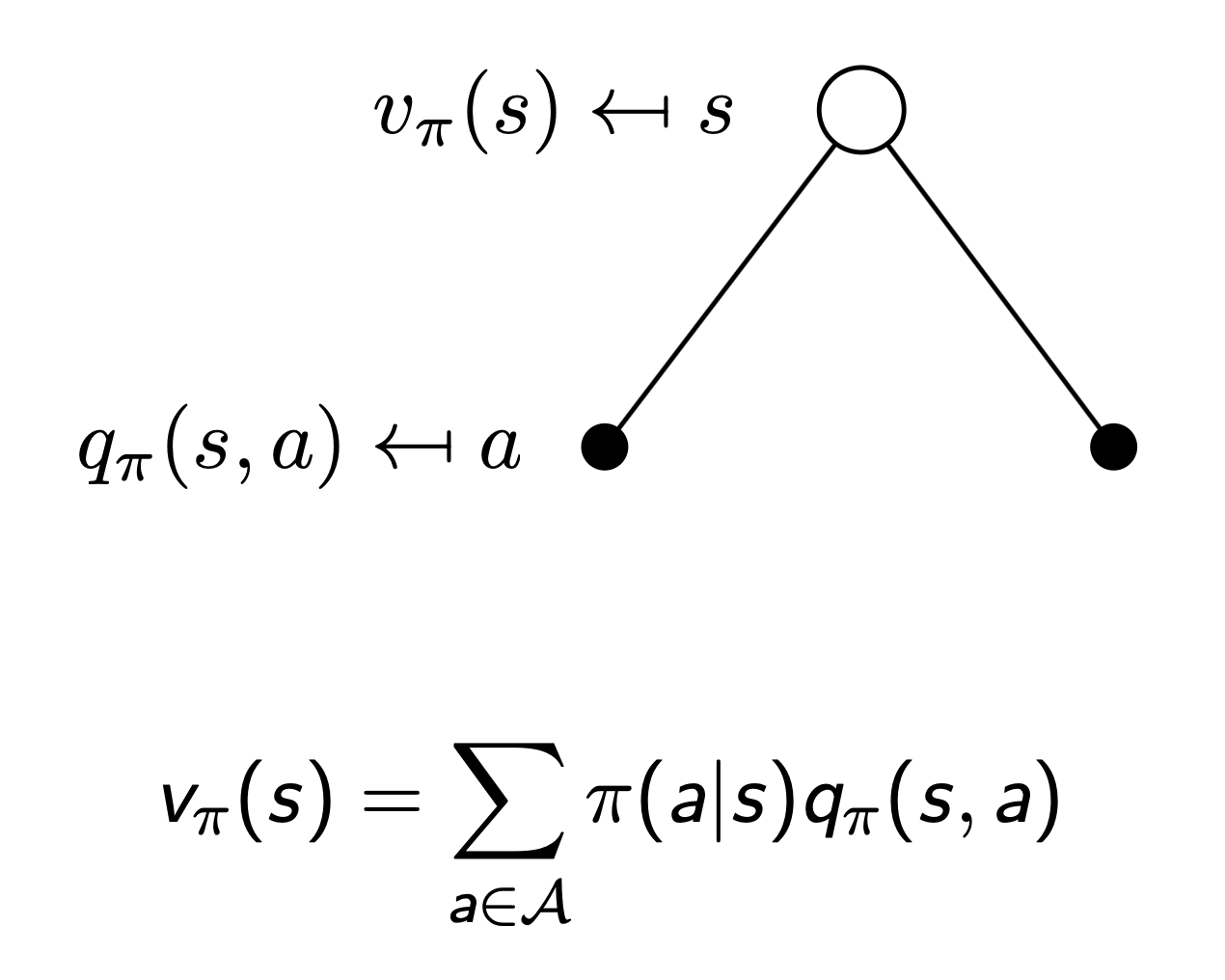
state-value function
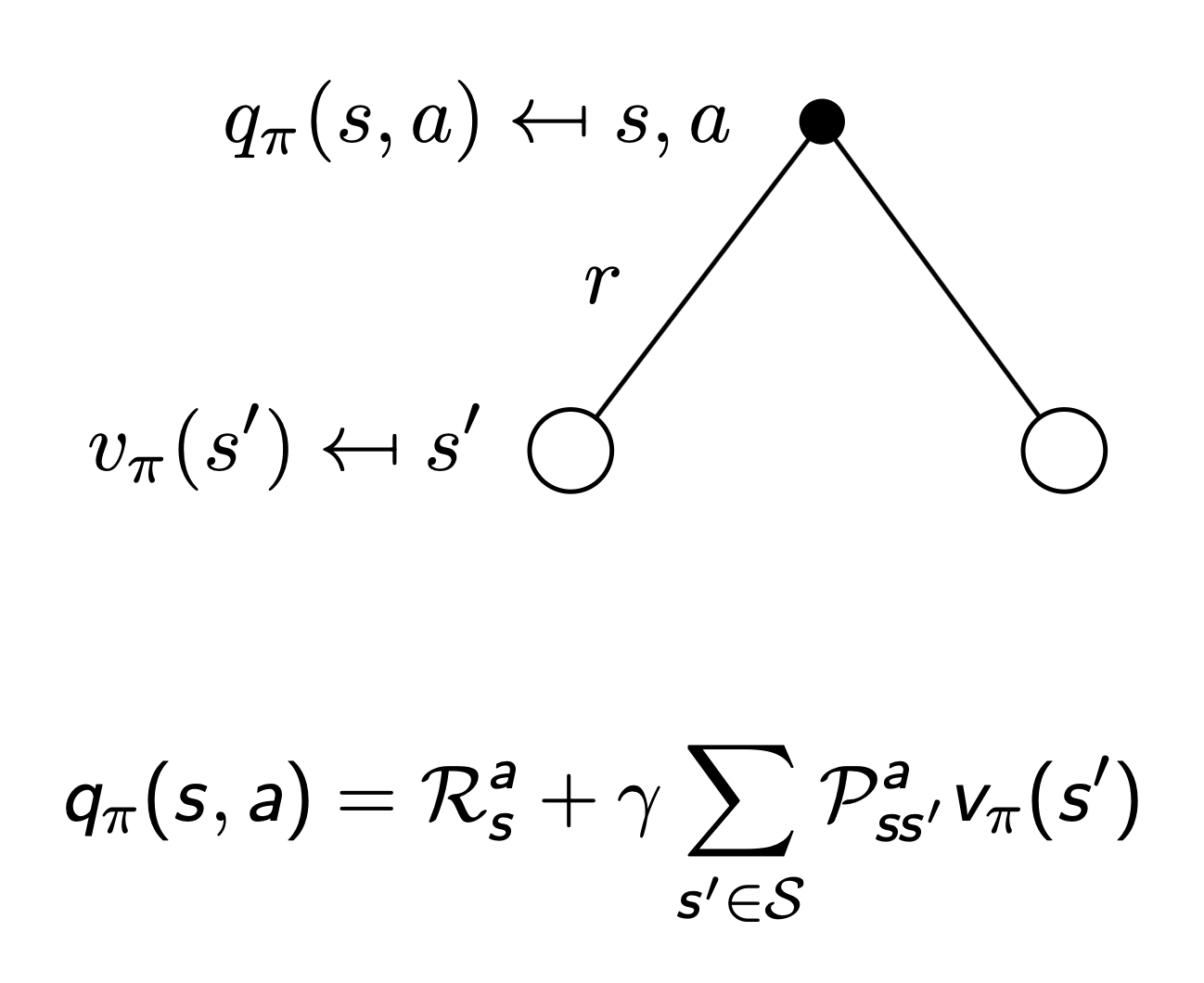
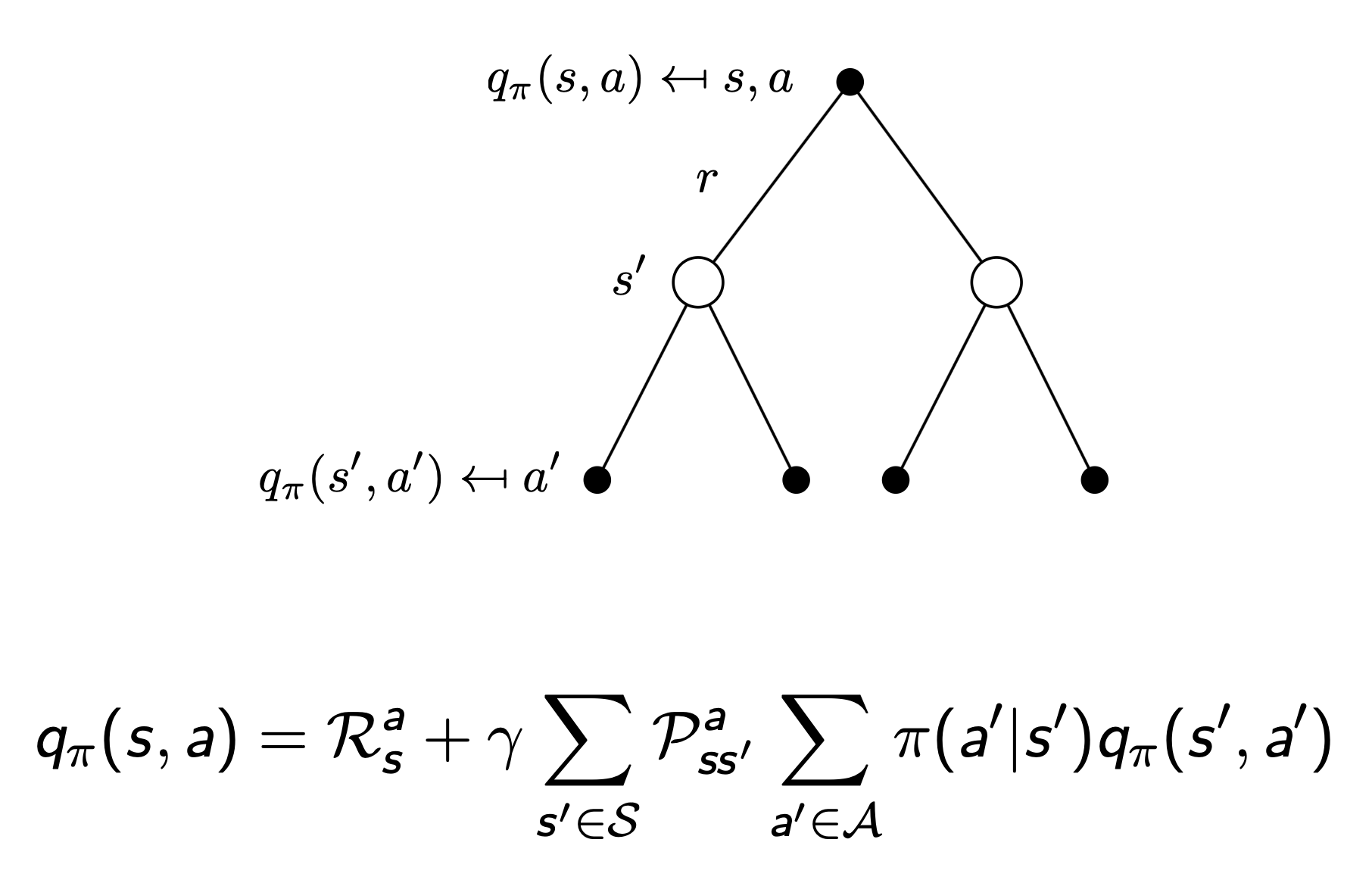
action-value function
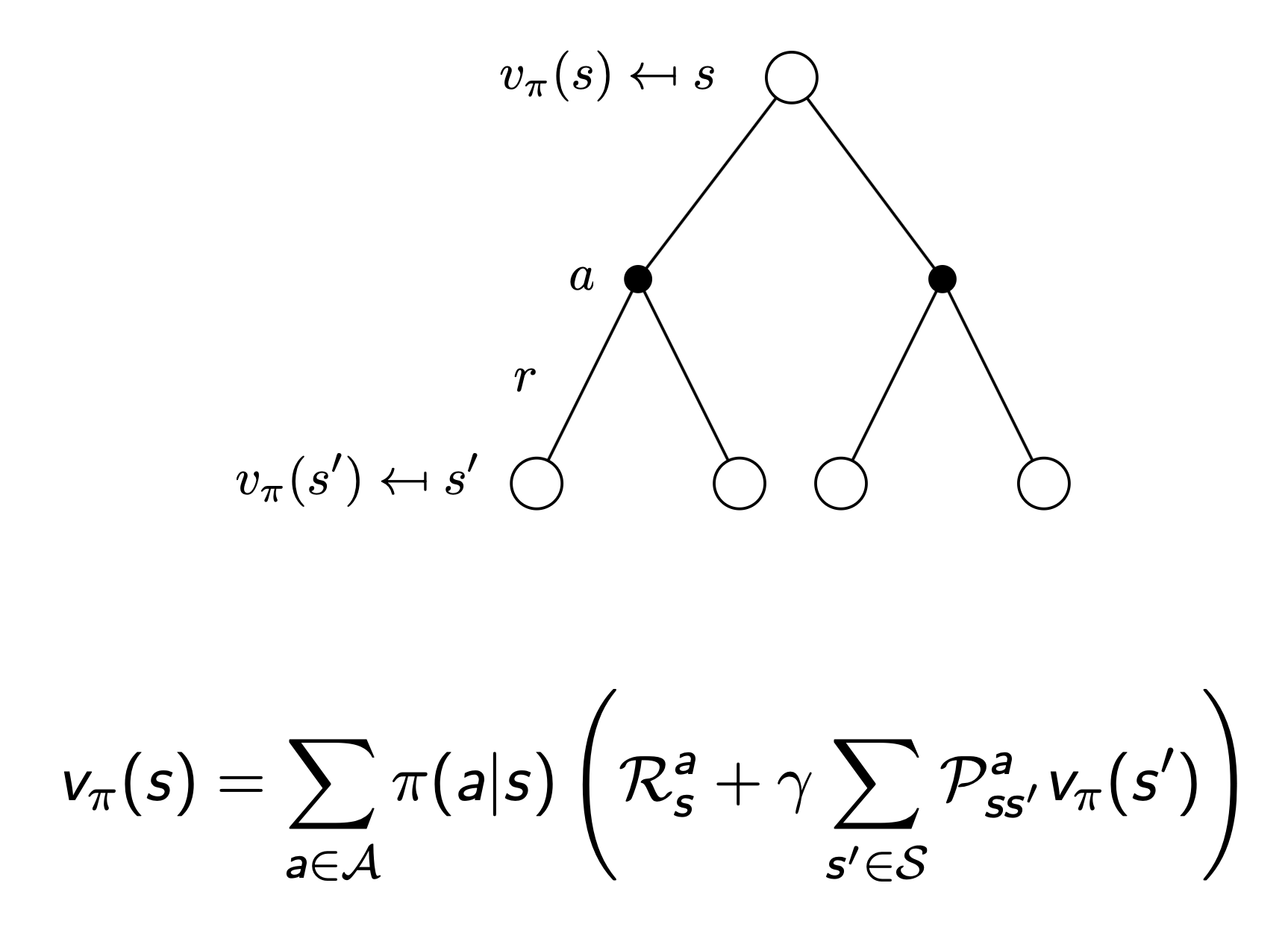
- two step state-value & action-value function
- value의 action reward에 action-value function을 적용
- action의 state reward에 state-value function을 적용
Optimal Value Function
optimal state-value function이란, 모든 policy 중에서 기댓값이 최대가 되는 경우의 value function
optimal action-value function이란, 모든 policy 중에서 기댓값이 최대가 되는 경우의 action-value function
- MDP는 최적의 value fn.을 찾았을 때 비로소 “해결”됨
Optimal Policy
\[\pi \ge \pi' \ \text{if} \ v_\pi(s) \ge v_{\pi'}(s), \forall s\]- 모든 MDP에 대해서 이론적으로
- 다른 모든 policy $\pi$ 와 같거나, 더 나은 policy $\pi_*$ 가 반드시 존재
- 모든 최적의 policy들은 최적의 value fn.을 만족 → $v_{\pi_}(s) = v_(s)$
- 모든 최적의 policy들은 최적의 action-value fn.을 만족 → $q_{\pi_}(s, a) = q_(s, a)$
- $q_*(s, a)$ 를 최대화 함으로써 최적의 policy를 찾을 수 있음
- 즉, $q_*(s, a)$ 를 알면 최적의 policy를 찾은 것과 마찬가지
- Bellman eq.을 적용해서 동일하게 recursive한 방식으로 해결 가능
Solving the Bellman Optimality Equation
- Bellman Optimality Equation은 비선형적이며, 일반적으로 closed form solution이 없음
- 다양한 iterative 방식을 적용
- Value Iteration
- Policy Iteration
- Q-learning
- Sarsa